Dead Reckoning is not Mission Impossible: Functional Safety Challenges in ADAS and Autonomous Vehicles
Over the last few years, Lorit has been very active with sensors used in autonomous vehicles (AVs) and advanced driver assistance systems (ADAS) of many shapes and sizes – from trucks and cars to robots and tractors. There are many challenges associated with sensors, not only deciding which ones to utilize in the application, but also how to detect and mitigate faults when implementing the chosen sensor technology.
There are Safety Integrity Level (SIL) requirements for sensors in general, and in the automotive domain this translates to the Automotive Safety Integrity Level (ASIL) defined by ISO 26262. The key challenge being whether a sensor can realize the required safety integrity on its own, or if additional redundant technologies are required to meet these functional safety demands.
In this blog we look at some of the issues and solutions to mitigate sensor faults in autonomous and ADAS applications.
Many vehicles depend on positional information to pinpoint exactly where they are at any given moment in time. Just as we are all accustomed to poor Wi-Fi reception when working in cafés, a weak or lost signal can have far more significant impact if a vehicle relies on this positional data while moving at speed.
Global Navigation Satellite Systems (GNSS) are used widely nowadays to provide autonomous geo-spatial positioning. This satellite data along with other diverse sensor inputs can achieve impressive accuracy – ranging from one meter down to centimeter-level precision, depending on the technology.
But what happens when a vehicle enters a tunnel, some many kilometres long, and the GNSS signal is attenuated to the extent the signal is no longer reliable?
This is where dead reckoning comes into play. By combining speed and directional information, the vehicle’s location can be estimated during periods of reduced GNSS quality. Automotive Dead Reckoning (ADR) integrates data from a 6-axis Inertial Measurement Unit (IMU) to estimate position changes based on speed and direction.
Dead reckoning, utilizing 3-axis accelerometers and 3-axis gyroscopes to estimate the position of a moving object, is a common technical solution nowadays. Starting from a known reference point, it calculates changes in position by factoring in speed, travel direction, and elapsed time – allowing vehicles to maintain reliable positioning even at the point when GNSS signal is unavailable.

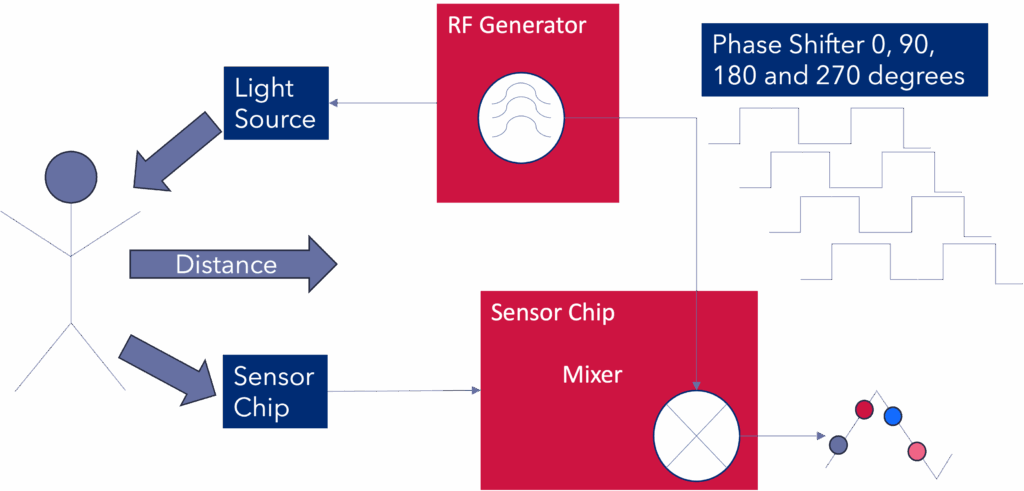
Many different sensor technologies are used for object detection, both internal and external to a vehicle. At Lorit, we have worked on a number of Time-of-Flight (ToF) sensors, which can detect who is sitting within a vehicle. This eliminates the reliance on pressure sensors to determine seat occupancy. Moreover, such ToF sensors, as 3D imaging sensors, can identify exactly where the driver/passenger is positioned, enabling optimized control of airbag inflation pressure. Because of this, ToF sensors often carry a fairly high safety integrity requirement.
ToF sensors can, however, suffer from defective pixels that could result in obscuring objects. “Dummy” pixels can be used as test pixels to confirm the proper operation of the sensor. The size of an object in relation to the number of defective pixels also affects what might be potentially missed.
Additional issues can arise due to the analog nature of these sensors: unambiguous ranges, signal-to-noise challenges, saturation, and “wiggling” (waveform deviations in the sensor). These also have optimum correction criteria.

Alastair Walker, Owner & Consultant
Looking to dive deeper into sensor fault mitigation, ASIL compliance, or functional safety in ADAS? Our consultants bring hands-on experience from projects across automotive and other safety regulated industries.
Contact us at info@lorit-consultancy.com or via a contact form for bespoke consultancy or join one of our upcoming online courses.
Learn moreFor external applications, ToF sensors are not always the optimal solution due to their limited range. Instead, LiDAR (light detection and ranging), Radar (radio detection and ranging), and camera-based systems have been widely used. In more critical systems, such as those controlling object detection and subsequent braking, safety can be improved with redundant implementations using different sensor technologies.
There are also fascinating new applications being discussed in the automotive industry at the moment. For example, NXP presented a system that uses sensors to detect posts or similar nearby objects and prevent a car door from being opened into them. Once again, this requires diverse sensor technologies to achieve the best safety outcomes and optimal result.
A project we were involved with last year focused on the detection of animals in fields, particularly fawns. Their natural instinct to lie motionless, especially when threatened, makes them particularly vulnerable to tractors mowing fields. The safety goal of such technology is to detect fawns in the grass during mowing and automatically raise the mowing blades to prevent injury.
Near-infrared (NIR) optical recognition is central to the technology, as it enables the system to distinguish between a fawn and grass. To further improve reliability, redundant technology enhancement such as body heat detection offers support in the event the optical detection does not detect the fawn.
In this application, the slower operating speed of tractors provides an advantage in terms of reaction times once an animal is detected.

There are many sensor technologies on the market today that support autonomous vehicles and ADAS. However, relying on a single technology carries risks if it malfunctions or fails to detect an object. Diverse sensor solutions can help mitigate these risks, but this needs to be weighed up based on safety integrity requirements, cost, and system complexity.
Many sensor solutions currently available will satisfy ASIL B requirements , while some may achieve ASIL D compliance. Ultimately, the level of safety achieved will be down to the application and the technology implemented.
By Alastair Walker, Owner / Consultant
If you’re working on ADAS, autonomous systems, or ISO 26262 compliance, our team can help you navigate the challenges with confidence.
Get in touch with us to discuss your project or enrol into one of upcoming online courses to elevate your skills.
Address Austria:
Lorit Consultancy GmbH
Siezenheimer Straße 35
5020 Salzburg / Austria
Address UK:
Lorit Consultancy Ltd
1 Craigathie Road
Roslin Midlothian / Scotland EH25 9BG